Research Projects
On this page:
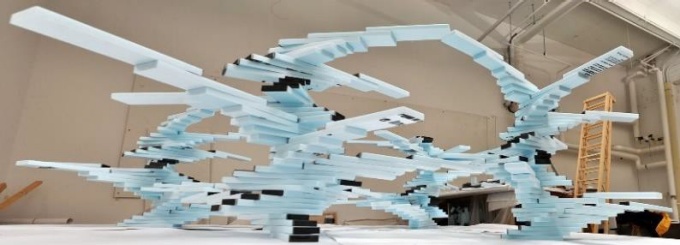
Long-lived Structures and Materials: Investigating Material and Construction Methods for Dry-stacked Corbelled Structural Systems

Faculty Involved:
- Georg Rafailidis (Architecture)
- Nils Napp (Computer Science and Engineering)
- Andreas Stavridis (Civil Structural and Environmental Engineering)
Some of the oldest known human buildings are dry-stacked, corbelled structures, which do not require mortar, fasteners or reinforcement and eliminate the need for frequent construction.
Today, these structures are well suited for assembly by robots since they require precise placement in complex geometries, and the lack of fasteners and mortar makes recycling the building materials much easier. Under the exploratory grant, the team will produce a prototype as proof of concept highlighting the synergy between technical and aesthetic questions that arise at the intersection of advanced automation and architecture.
The SMART exploratory grant will trigger an in-kind sponsorship by a global concrete manufacturer to fabricate concrete blocks at full scale to answer the following questions:
- How can these novel corbelled typologies found empirically, at model-scale, be scaled-up to full, architectural scale?
- How can the novel structures and their respective stacking strategies be translated into construction-grade materials like concrete and brick?
- How can the complex corbelled geometries accommodate unforeseen conditions on site and be made robust through robotic automation?
3D Printing Flexible Solid-State High-Energy-Density Graphene Supercapacitors

Faculty Involved:
Energy storage is the key component for creating sustainable energy systems. However, the ever increasing energy demand requires the development of next-generation, high-power energy storage systems.
To provide peak power, conventional charge devices such as batteries currently are bulky and heavy. As a result, they are not suitable for next generation portable electronic devices, which require light weight, small thickness and good flexibility.
As a rapidly emerging technology, supercapacitors are capable of storing and discharging energy very quickly and effectively. Thus, they have attracted enormous interest and are considered to be one of the most promising energy storage devices to satisfy future energy storage needs. As an emerging 2-dimensional nanomaterial, graphene possesses unique electrical, thermal and mechanical properties, making it one of the most promising materials for fabricating supercapacitors. However, traditional graphene based supercapacitors can only be printed in 2-dimenional form, which severely limits its application. In order to unlock graphene's exotic properties, this project investigates a new 3D printing technology to fabricate a graphene supercapacitor based on ice crystallization with the goal to develop an innovative 3D graphene aerogel printing technology based on rapid freezing for supercapacitor application.
Zero Energy Adaptive Façade (ZEAF) for Energy Efficient Buildings


Faculty Involved:
- Haiqing Lin (Assistant Professor, Chemical and Biological Engineering)
- Jin Young Song (Assistant Professor, Architecture)
- Jongmin Shim (Assistant Professor, Civil, Structural and Environmental Engineering)
Awarded first place at the Architect’s Newspaper’s 2017 AN Best of Design Awards in the research category, setting itself apart as a beautiful, minimalistic solution to a widespread and growing problem in cities worldwide.
With buildings accounting for 38% of all CO2 emissions and 73% of electricity consumption in the U.S., energy efficiency in the construction and operation of infrastructure is desperately needed. While recent dynamic systems based on mechanical actuators use additional energy and require high maintenance, ZEAF, made of light-responsive polymers, pursues zero-energy adaptive shading by smoothly responding to the amount of light entering the space, creating a dappled-light effect. This project explores a sustainable design strategy that utilizes elastic instability to create dynamic motion at the building envelope. The current dynamic shading systems adopt either glass enhancement or motorized mechanical movement.
This study introduces snapping-induced motion as an alternative actuation mechanism to control apertures, and proposes Snapping Facade as a new dynamic shading system. Based on analytical and numerical study, the researchers fabricated the assembly of a prototype snapping facade and validated the hand-operated snapping motion. The proposed snapping facade suggests a novel way to recycle the strain energy stored in structures via elastic instability. As interdisciplinary collaborators, Lin focused on optimizing the photo-chemical reaction, while Song advanced the parametric design of the envelope system, and Shim developed the innovative pattern and alternative actuation.
Worker Fatigue Detection for Interoperable Co-Robot Safety in Construction


Faculty Involved:
- Lora Cavuoto (Industrial and Systems Engineering)
- Nils Napp (Computer Science Engineering)
- Matthew Bolton (Industrial and Systems Engineering)
- Edward Steinfeld (Architecture)
In construction, exertion is the leading cause of nonfatal injuries requiring days away from work (37 per 10,000 workers), and overexertion in lifting caused approximately 38% of work-related musculoskeletal disorders.
This project develops a methodology for detecting fatigue in workers that is robust to worker identity and task variability in construction sites. This information allows us to assess the efficacy of co-robots to mitigate fatigue-related injuries. This project integrates wearable sensing and machine learning methodologies with current ergonomics and safety models. The long-term goal of the research is a data-driven safety model that provides real-time assessment of a worker’s condition, links safety to performance, and optimizes co-robotic interventions to worker fatigue. The short-term objectives are developing and validating a change-point based detection methodology for use in worker evaluation in unstructured construction environments.
Noise Regulation in Small Unmanned Aerial Vehicles: Towards Ergonomic Integration in Complex Warehouse Environments


Faculty Involved:
- Mostafa Nouh (Mechanical and Aerospace Engineering)
- Souma Chowdhury (Mechanical and Aerospace Engineering)
- Richard Salvi (Communicative Disorders and Sciences)
- Christina Stocking (Communicative Disorders and Sciences)
Small unmanned aerial vehicles (UAVs) promise to revolutionize inventory management and materials handling in warehouses, factory floors, and construction sites (a multi-billion-dollar market potential).
However, their perceived noise (and safety) issues present an important barrier to delivering on this promise. While a few investigations of UAV acoustics exist, the critical understanding of 1) how humans perceive and respond to UAV noise, and 2) the nature of human–UAV interactions in these unstructured environments, is practically non-existent. Moreover, the few existing solutions to mitigating UAV noise impact compromises their aerodynamic/structural performance.
To address these technical gaps, and thereby facilitate safer and ergonomic integration of UAVs in co-robotic work environments, this project brings together experts from vibration/acoustics, design-optimization/autonomous-systems, audiology, and human-cognition. Our approach is to re-design the protective rotor-envelopes using optimized anechoic material and geometry for noise attenuation. This project combines physical and simulated experiments to characterize the acoustic transmission properties, model the UAV acoustic environment, conduct experiments to construct cognitive models of human perception of UAV noise, develop a virtual robotic simulation environment to study human–UAV interactions, and optimize the design.
The outcomes of this project will both create new capabilities and new inter-disciplinary PI collaborations at UB, along with establishing the basis for longer-term R&D goals of a paradigm shift in “advanced robotics in manufacturing/logistics”, one that is founded on the notion of environment/human-factor-aware autonomous systems.
Aerial Robotics
- Simulated flight dynamics of a flapping wing aerial vehicle
- SLAM with aerial vehicles
- Multi-UAV search
- UAV rules for traffic control
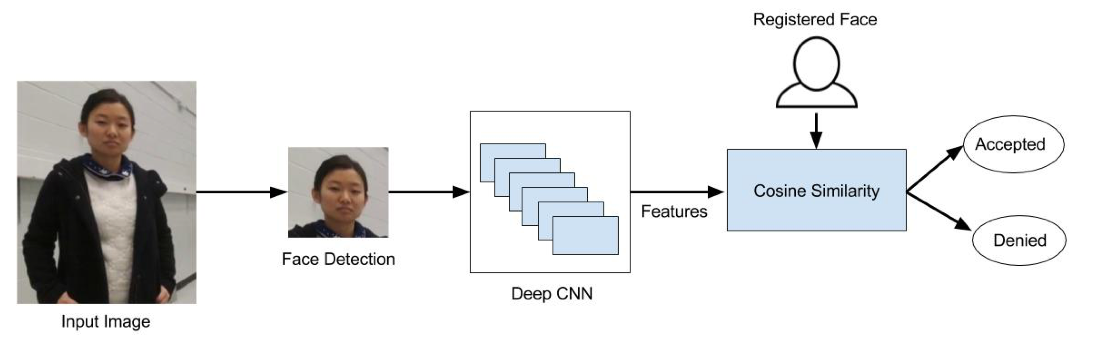
- Face tracing with MAVs
Gait Analysis

- Gait analysis using smart insole
- Ground truth information from Vicon via Nexus