Automation Sandbox


The SMART Automation Sandbox is an 800 ft², high technology center for students, faculty and staff, equipped with exciting capabilities and tools created for hands-on learning and projects.
About the Automation Sandbox
The SMART Automation Sandbox is a space for all disciplines to explore the role of automation and robotics in society and seeks to support discovery through student projects, hands-on course activities, and individual tinkering - from the factory floor to urban planning and STEM to social sciences.
Who is this facility open to?
Faculty • Staff • Students • Researchers at other academic institutions • Government and industry
Reservations
The SMART Automation Sandbox will be available on a limited basis for course support during the Fall 2020 semester. Please send an email to smart-coe@buffalo.edu with any questions you may have.
Facility Information
Location:
108 Furnas Hall, North Campus
Who to contact:
Ken English
Deputy Director, SMART Community of Excellence
Email: kwe@buffalo.edu
Phone: (716) 645-2683


Orientation Sessions for the SMART Automation Sandbox
Summer sessions are by request. Contact Ken English to schedule your session. Equipment-specific training sessions can be scheduled once orientation is complete.
Equipment
Baxter Robot

Baxter is a collaborative robot designed and manufactured by Rethink Robotics. Baxter head a 12 sonar transducers distributed along the periphery of the head which act as proximity sensors. The head display acts as a face to express different facial expressions. Baxter has two arms with 7 degrees of freedom, each joint has Series Elastic Actuators with position and force sensors. These sensors can be used for collision detection while working in the proximity of human operators. The whole robot is mounted on four wheels for easy transportation.
The robot has a built in Zero Force Gravity Compensation mode which allows a user to teach the positions of the end effector without explicit programming. Thus, the robot can be controlled in a teaching model. Each arm has a maximum payload capacity of 5 lb (2.3kg). The onboard computation consists of 3rd Gen Intel Core i7-3770 Processor (8MB, 3.4GHz) w/HD4000 Graphics, 4GB, 1600MHZ DDR3 RAM, and 128GB Solid State Drive. The software development kit (SDK) interfaces with hardware through ROS (Robot Operating System. The connection from the workstation to the robot can be made using an Ethernet connection and the robot has an emergency shutdown switch. More details about the hardware and software can be found in the adjacent links.
UR3 Robot

UR3 is a collaborative table top robotic arm built by Universal Robotics. The robot has 6 degrees of freedom with all writs being revolute joints. Each joint has 360 degree working range and 1800/s maximum. The end wrist has infinite working range. The payload capacity is 3 kg / 6.6 lbs with maximum reach range of 500 mm / 19.7 in. The UR robot is equipped with a Safety stop when the robot meets a force that is 150 N. This force can be forced as low as 50 N.
The robot is also equipped with Robotiq 2-Finger Adaptive Robot Gripper which can provide feedback about part detection and object size. The control box for robot is equipped with the teaching pendant - Polyscope GUI interface which is used to control the robot. There are mainly two ways to program - either using Polyscope GUI interface using the touch screen teach pendant – or with UR script language. There is also a ROS interface using python or C++. The robot uses Ethernet communication and has Real-time Data Exchange module working at 125 Hz for data exchange. More details about the hardware and software is given in following links.
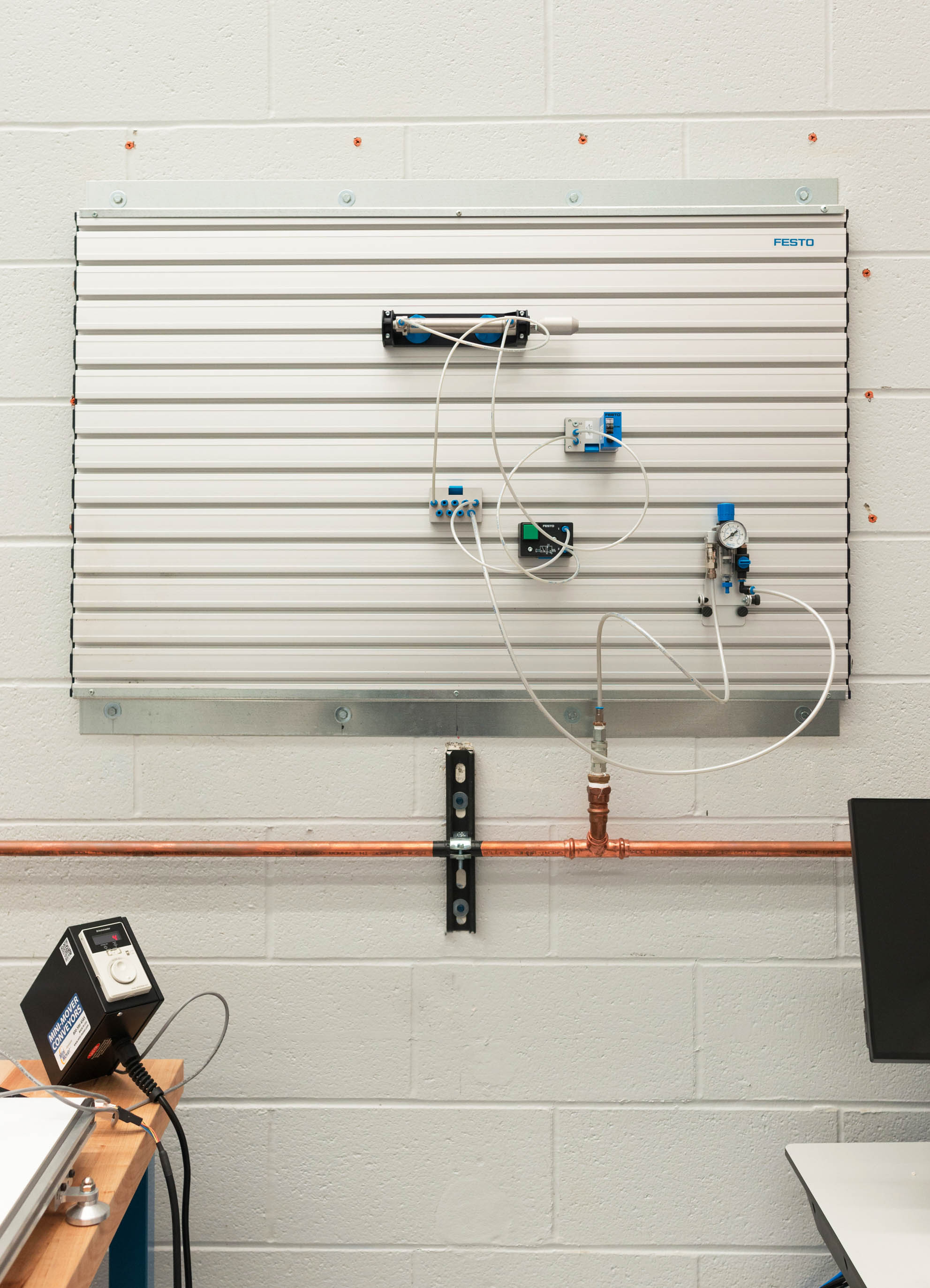
Pneumatic System and PLC

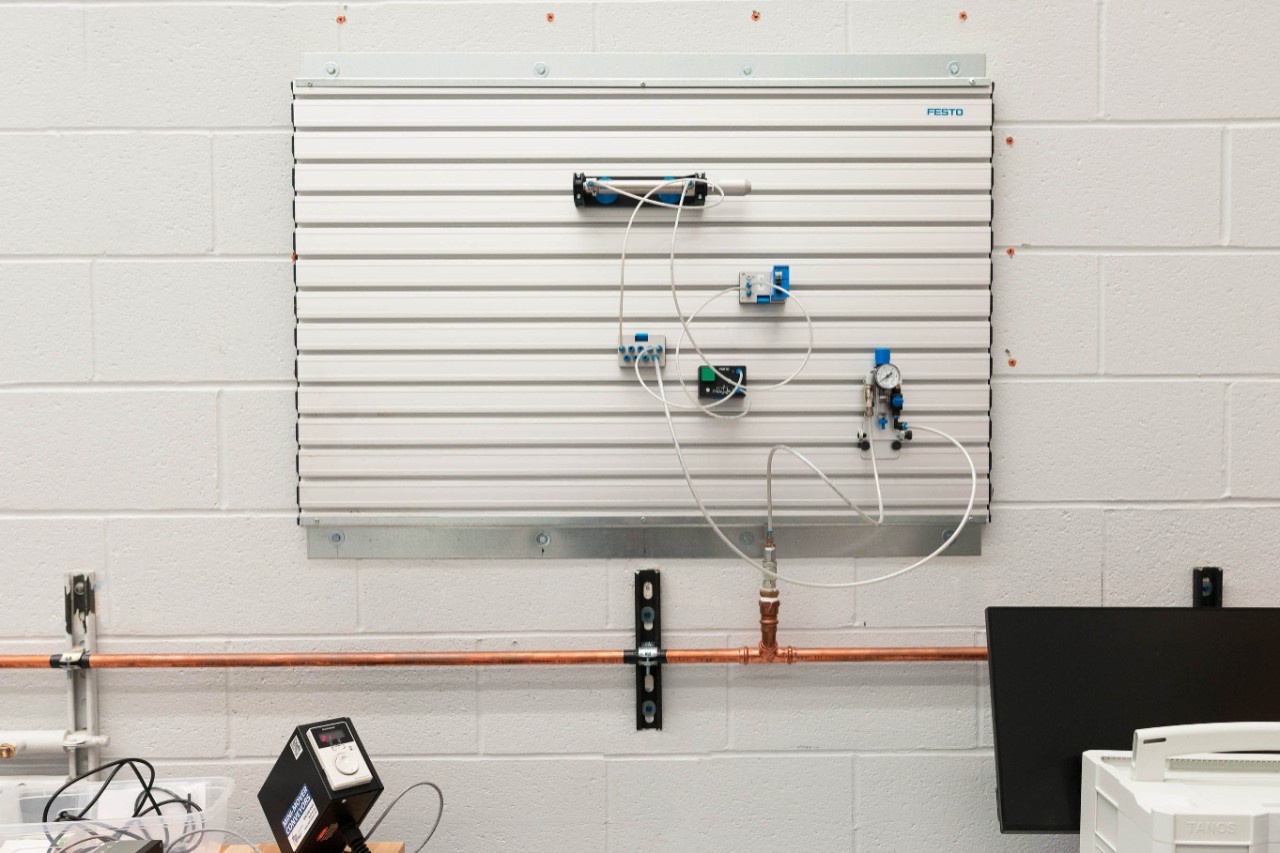


Pneumatic system consists of 6 modules (TP101) of pneumatics components to provide basic training in pneumatic control technologies. The components include Profile Plate, Stand, 3/2-Way DCV with Pushbutton, 3/2-Way DCV with Pushbutton, 5/2-Way DCV with Selector Switch, Pressure Gauge, 3/2-Way Roller Lever Valve, Pressure Sequence Valve, Single-Acting Cylinder, Double-Acting Cylinder, Manifold, 5/2-Way DCV with Pneumatic Activation Switch, Pressure Regulator Valve with Gauge, 5/2-Way Double-Pilot Valve, Dual-Pressure Valve (AND), Shuttle Valve (OR), Quick Exhaust Valve with Silencer, One-Way Flow Control Valve, Start-Up Valve with Filter Control Valve, Time-delay Valve, Plastic Tubing.
Along with these equipment there is one module of electrical relays (TP102) which can be controlled using PLCs. There are 6 modules of PLC boards and interfacing components from Velocio. Each PLC has 12 digital inputs and 12 digital outputs. The PLC programming is done through Velocio builder in which programming can be done with ladder logic or flowchart and upload the program to the PLC. The PLC branching can also be done with branching buses to control various other components like conveyor belts. Explore the pneumatic manuals and workbooks below.
Miscellaneous
To facilitate easy handling of equipment and provision of workspace, the lab is equipped with 5 heavy duty worktable with cabin and wheel base.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}